大阪国際工科専門職大学 情報工学科3年:田熊水稀
生まれは大阪、育ちは宮城、帰ってきて大阪!
初めまして!なんちゃって関西人の田熊水稀です!
自分には何が向いているのだろう?何ができるのだろう?と考え続けて、今でも学校でパソコンに向かいながら模索中!
スリーアップ・テクノロジーさんには自分にできる事や知ってる事、可能性を増やそうと思い、実習先として10月1日から行かせてもらいました!
~AI画像認識ロボットハンドリングシステムの構築~
前回の実習先のブリッジソリューションで取り組んだ画像認識AIが実際の現場に納品されました。
その画像認識AIはスリーアップ・テクノロジーで開発されており
前回の実習経験から継続してAIのさらなる効率化と課題の解決を取り組むことになりました。
課題の内容は同じく実習メンバーである伊東君が詳しく解説しているのでそちらをご覧ください!
~実習中の目標~
1.キーポイント検出を活用した
ロボットアームのピック&プレイスの構築
2. Node-REDを活用した産業用ロボットの制御プログラムの開発
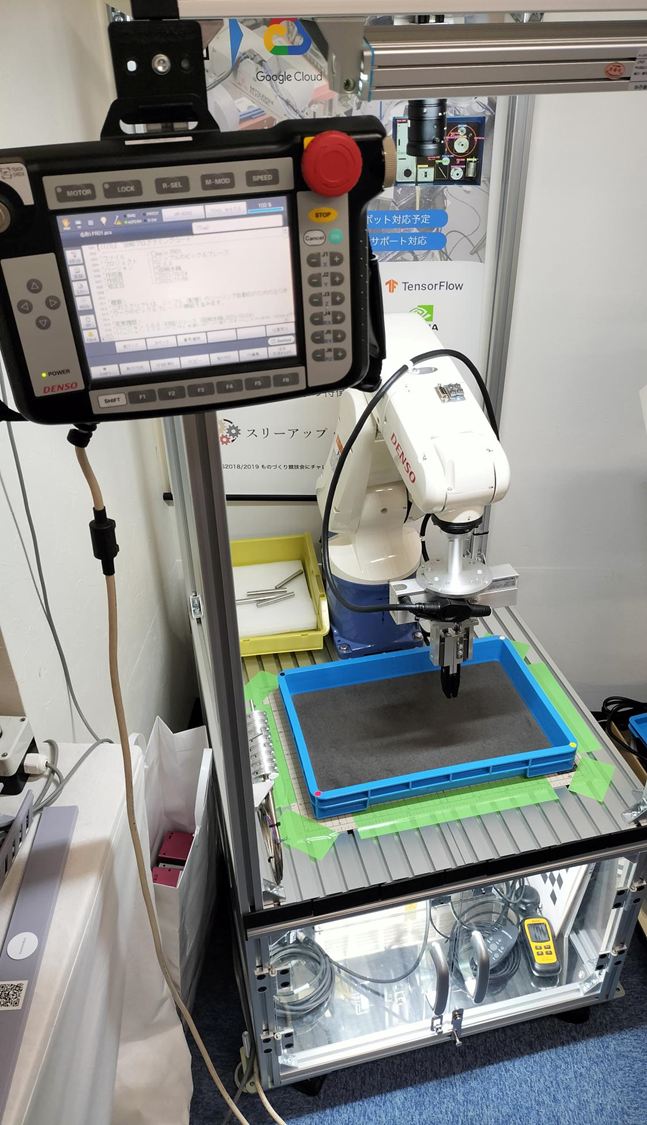
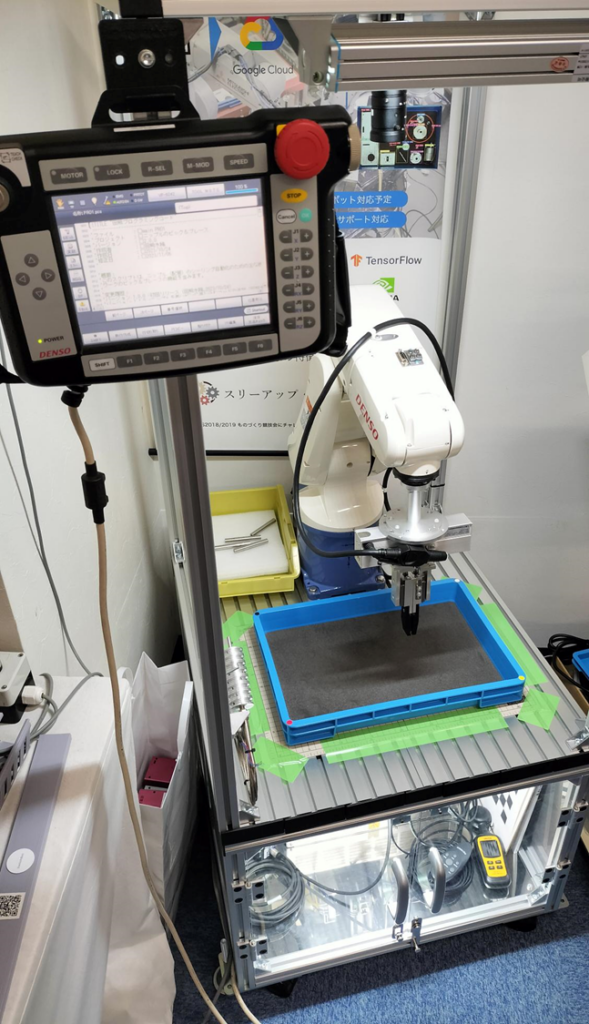
今回の実習ではロボット制御を担当しました。
・20種類以上の大小様々な継手を完璧にピック&プレース出来るようにロボット制御を行う事。
・万能なハンドの爪の作成。
~システム構成図~
継手のピック&プレースのシステム構成図を使って何を行っているのかを解説します。
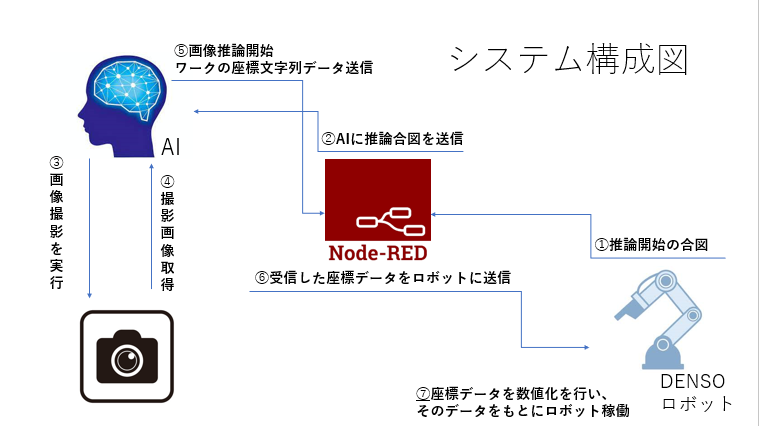
まずロボットから推論開始の合図を送ることでNode-REDを通してAIに伝わり、AIは画像の撮影・推論を行います。AIは画像推論により継手の座標文字列データをNode-REDを通してロボットに返します。ロボットはその座標データをもとに任意の指定のワークのピック&プレースを行うといったシステムになっています。
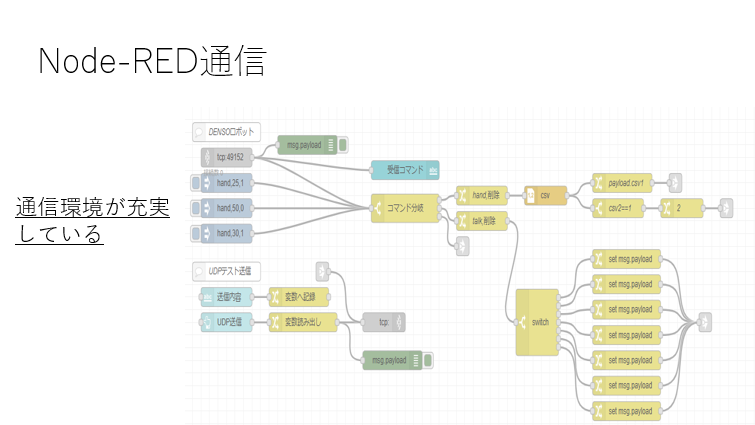
~Node-RED~
なぜNode-REDを活用しているのか。
Node-REDは今回のタスクにおいてAIとロボットを繋ぐ役割をしています。
Node-REDはイーサネットやTCPやUDP、ウェブソケットといった通信を行う事が出来るnodeが数多くあり通信環境が充実しています。AIとロボットを接続するのに整った環境でした。
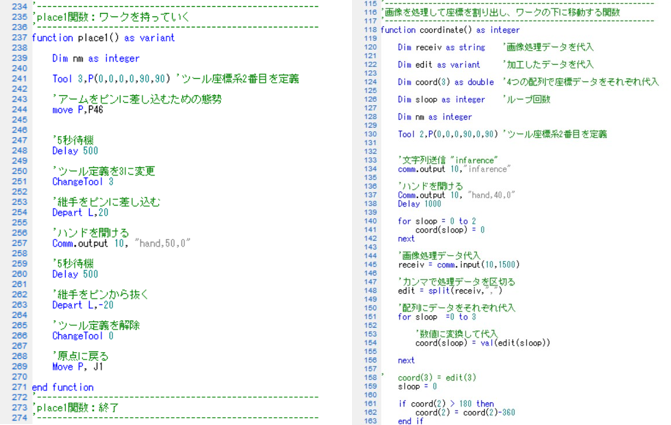
~DENSOプログラミング~
DENSOロボットのプログラミングで出来た事。
今回のシステムではロボットに送られてくる情報を元にアームを自動で操作する必要があります。
推論データをロボットが受信することができたのでそこから自動で取得した座標データをアームの座標パラメータに入力し、特定した座標からワークを掴み、移動させることに成功しました。
特に苦労したことは
・DENSO独自の言語のため習得が難航
・座標取得のコード理解と作成 ・ツール座標系の仕様理解と操作
~爪の作成~

•汎用品の発表用継手に特化した爪の設計作成を行った
•大まかな設計からいくつもの修正を行う事で課題となる継手をしっかり把持できる爪を作成した。

~今回の実習を通して~
達成できた事
・指定位置にある継手のピック&プレースのプログラムコードの作成が出来た
・Node-REDを用いて通信を行い、データの送受信を可能とした
苦労した点
・DENSO独自の言語だったため理解活用に難航し、マニュアルを読みながら前の実習生が残したコードはあったものの手探りでプログラムを作成した。
・ハンドを作成する時納得のいく爪が出来ずに何度も設計しなおしようやくまともなハンドを作成した。
・6軸のロボットアームでも可動域が思いのほか狭くピンに差し込む姿勢の調整を何度も行った。
獲得したスキル
・ChatGPT の設定方法や使い方応用の身に着けることが出来た
特にスケジュール作成や発表資料作成の本文やイラスト生成など
・Node-REDの基本的操作方法を習得することが出来た
・産業用ロボットの設定や操作方法、マニュアルの読み方など多くのことを学ぶことが出来た
~最後に~
スリーアップ・テクノロジーの三上さん。1か月半の短い間でしたがありがとうございました!新しく触れる技術や知識ばかりで1つのタスクをこなす事にも多くの時間を費やし、考えて努力しそのたびに達成感を感じたすばらしい1か月半でした。
ここで培ったものを学校のみならず社会でも活用していけるよう努めていきたいと思います!
素晴らしい環境を整えていただいた三上さん、お忙しい中実習に受け入れていただいて本当にありがとうございました!