こんにちは
大阪ハイテクノロジー専門学校 人工知能学科 2年:中村海里
初めまして、スリーアップ・テクノロジーさんでインターン中の中村海里と申します
今回はインターン中に開発したシステムを2つ紹介します
実習内容(産業用ロボットとAI連携システム開発)
私は今回のインターンを通して何をしたいか考えたとき、小さいころから好きだったロボットに触れたいと思い、今回の実習内容に産業用ロボットを選びました。また、これからはAIがますます進化し、ロボットを人間ではなくAIが操作する時代が近いと感じています。そこで、今回の実習内容として産業用ロボットとAIの連携システムの開発を選びました。
1.ヘルメットの有無判定
最初の実習内容としてヘルメットの有無を判定しそれに基づいて産業用ロボットが動くシステムを開発しました。
Raspberry Pi5と産業用ロボットであるデンソーのアームロボットを使って目の前にいる人がヘルメットを被っているのか、いないかを判定し被っていれば通常通りに動き被っていなければ停止するシステムです。
文で説明してもわかりにくいと思うので実際の動画をご覧ください
システムの概要
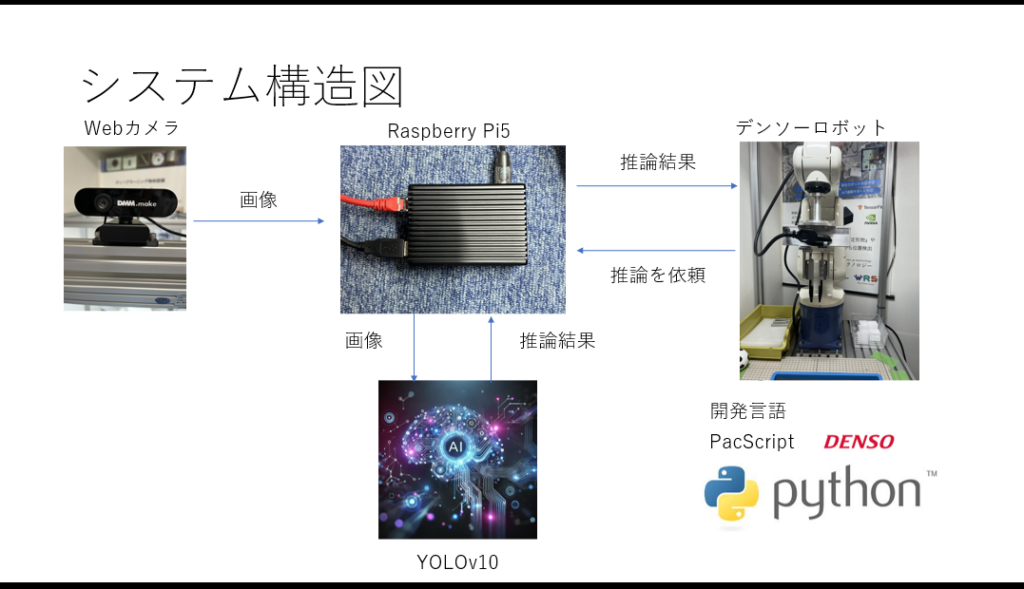
このシステムでは、デンソーロボットからRaspberry Pi5に推論指示が送られ、推論後に動作が決定されます。Raspberry Pi5がカメラで撮影した画像をYOLOv10で解析し、ヘルメットの有無を判定します。その結果をデンソーロボットに送信し、ロボットはその情報に基づいて動作または停止します。
システム構成図
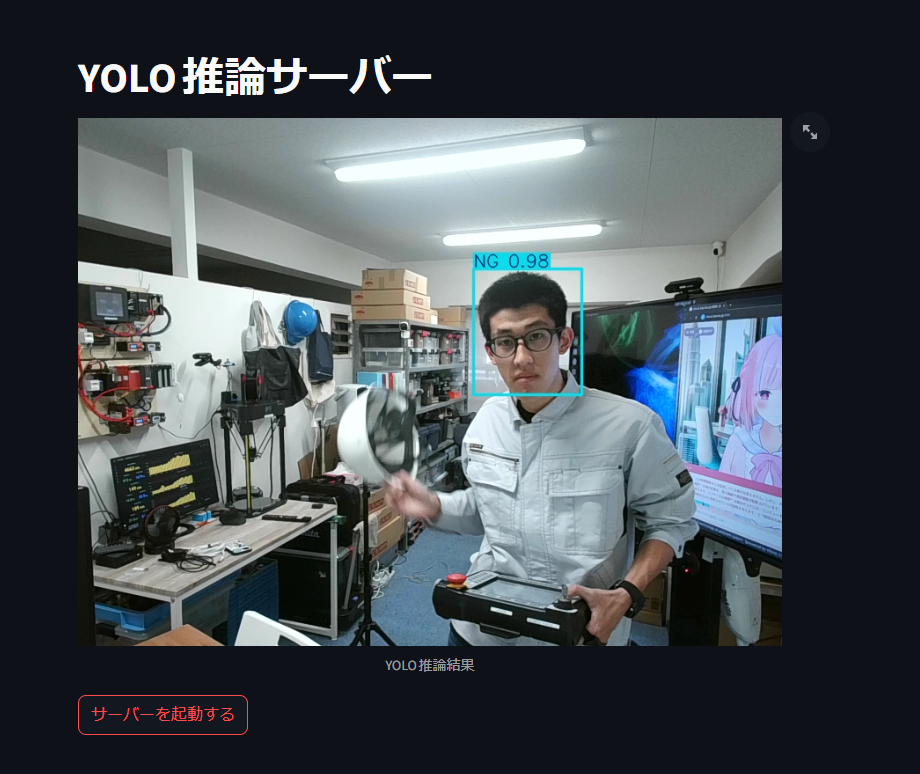
実際の推論画面
ヘルメットを被っているとOKで被っていなければNOとなります

2.AIプーリキャッチャー
ヘルメットの有無判定システムの次にプーリを自動検出してアームロボットにつかませるシステムを開発しました。
こちらもよければ動画をご覧ください
システムの概要
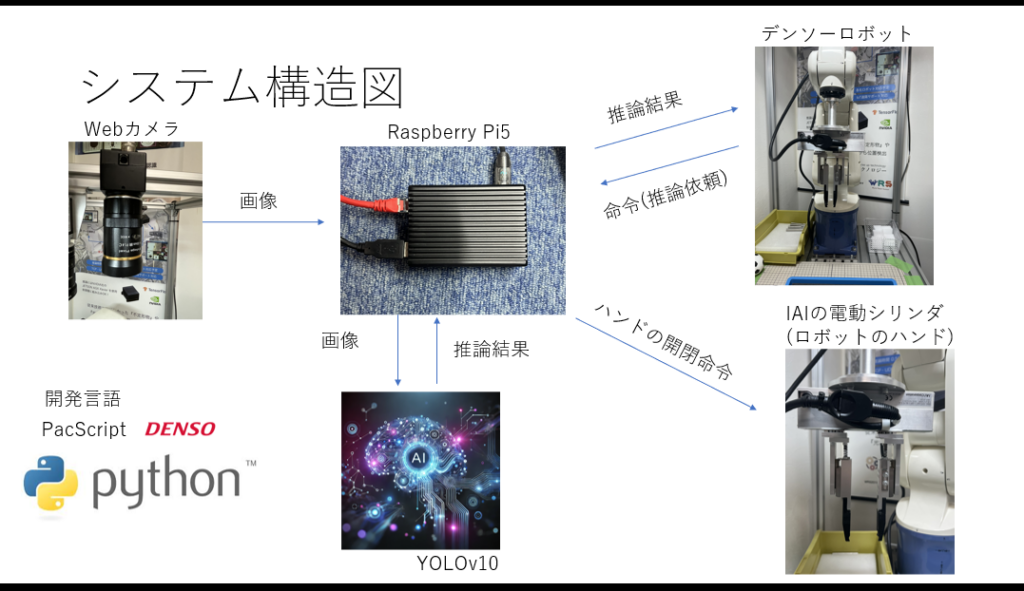
このシステムは、デンソーロボットとRaspberry Pi5を連携させたAI産業用ロボットです。デンソーロボットがRaspberry Pi5に推論依頼を送り、Raspberry Pi5はカメラで撮影した画像をYOLOv10で解析します。解析結果として、プーリの個数と中心からのx軸・y軸の距離をデンソーロボットに送信します。デンソーロボットはそのデータを基に動作し、全てのプーリがなくなると自動で停止します。
システム構成図
インターンを通して
今回スリーアップ・テクノロジーさんでのインターンを通して社会に出るための知識や技術などたくさんのことを学ばせていただきました。特に心に残っているのは産業用ロボットを動かす難しさやAIに頼りすぎてプログラムが分からなくなったこと、ノウハウを仕事中の先輩や上司に聞けるようなコミュニケーション能力が大切だということです。
最後に
今回インターンを受け入れてくださったスリーアップ・テクノロジーの三上さん。1か月半の間ありがとうございました。「失敗しても大丈夫だからやってみな」と言われたとき、とても安心できました。そのおかげでたくさんのことに挑戦できたインターンでした。このインターンを通して学んだことを来年の卒業研究や卒業後に待っている職場で生かしていけるように頑張ります。
スリーアップ・テクノロジーの三上さん。1か月半の間たくさんのことに挑戦させていただき本当にありがとうございました。